

Yüzen robot üretimi için Manta vatozundan ilham aldılar
Arkasındaki mühendisler bu tasarımın yüzen robotun daha hafif, daha hızlı ve daha enerji verimli olmasını sağladığını iddia ediyor.
İyi yüzebilen bir robot yapmak şaşırtıcı derecede zor olabilir. Bunun bir nedeni, organizmaların suda nasıl hareket ettiğine dair fiziğin genellikle karmaşık ve taklit edilmesinin zor olmasıdır. Ancak bu durum araştırmacıları, daha iyi su robotları yaratabilmek için okyanus hayvanlarının nasıl hareket ettiğini incelemekten alıkoymadı.
Bu alana kayda değer bir katkı, kelebek vuruşu yapabilen manta vatozu benzeri bir robot geliştiren Kuzey Carolina Eyalet Üniversitesi mühendislerinden geldi. Tasarımlarının ayrıntılı bir açıklaması bu hafta Science Advances dergisinde yayınlandı.
NC State Üniversitesi’nde doçent olan ve makalenin yazarlarından Jie Yin bir basın açıklamasında, “Bugüne kadar yüzen yumuşak robotlar saniyede bir vücut uzunluğundan daha hızlı yüzemiyordu, ancak manta vatozları gibi deniz hayvanları çok daha hızlı ve çok daha verimli bir şekilde yüzebiliyorlar” dedi. “Daha hızlı, daha enerji verimli yumuşak robotlar geliştirip geliştiremeyeceğimizi görmek için bu hayvanların biyomekaniğinden yararlanmak istedik.”
Sonuç olarak ekip, silikon bir “kelebek bot “un iki versiyonunu bir araya getirdi: biri saniyede ortalama 3,74 vücut uzunluğuna ulaşabilen, diğeri ise keskin bir şekilde sola veya sağa dönebilen. Her ikisi de yaklaşık bir insan avucu büyüklüğünde.
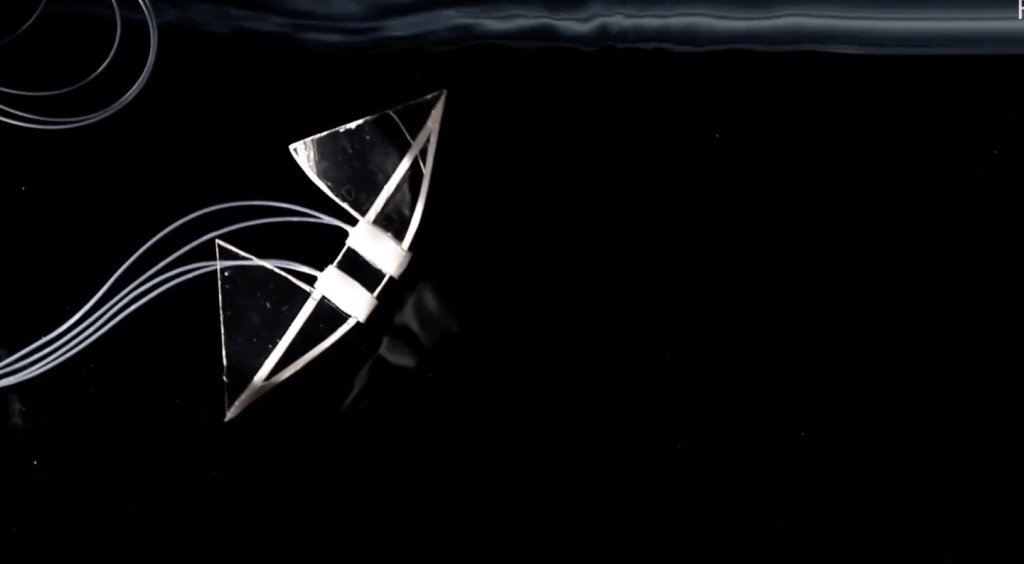
Kanatları doğrudan çalıştırmak için motorlar kullanan geçmişteki benzer biyolojiden esinlenen robot konseptlerinin aksine, NC State ekibinin robotu, bir saç tokası veya açılır bir zıplama oyuncağı gibi iki farklı konuma geçen “bistable” bir kanatla kanat çırpıyor. Kavisli, dönen kanatların konumunu değiştirmek için araştırmacılar, robot gövdesinin üst ve alt odalarına hava pompalamak için bir ip kullandılar. Bölmeler şiştiğinde ve söndüğünde, gövde yukarı ve aşağı bükülerek kanatların ileri geri hareket etmesini sağlıyor.
Robotlar akvaryumda test edilirken, araştırmacılar üst bölmenin şişirilmesinin yumuşak gövdenin yukarı doğru bükülmesine neden olarak aşağı vuruş hareketini tetiklediğini gördüler. Bunu söndürmek ve alttaki pnömatik hazneyi şişirmek, gövdenin aşağı doğru bükülmesine neden olarak kanatlarla yukarı doğru bir vuruşa neden oldu. Yukarı vuruştan aşağı vuruşa geçiş sırasında robot gövdesi suyun derinliklerine itiliyor ve ardından ileri doğru itiliyor. Bu tasarım, yumuşak robotun daha hafif ve daha enerji verimli olmasını sağlar.
Kelebek botun ilk versiyonu hız için üretilmiştir. Her iki kanadını da kontrol eden tek bir tahrik ünitesine sahiptir. İkinci versiyon manevra kabiliyeti için üretilmiştir. Her kanadın bağımsız olarak kontrol edilmesini sağlayan iki bağlı tahrik ünitesine sahiptir. Sadece bir kanadı çırpmak daha kolay dönmesini sağlar.
Yin, “Bu çalışma heyecan verici bir kavram kanıtı, ancak sınırlamaları var” dedi. “En bariz olanı, mevcut prototipler, merkezi gövdelere hava pompalamak için kullandığımız ince hortumlarla bağlanmış durumda. Şu anda bağlı olmayan, otonom bir versiyon geliştirmek için çalışıyoruz.”
Çalışmalardan kısa bir örnek:
kaynakça popsci



